シェイク!シェイク!
- 2013/02/16
- カテゴリー:電子工作, Make:
- タグ:コアラのマーチ振り機
またつまらないものを作ってしまった・・・
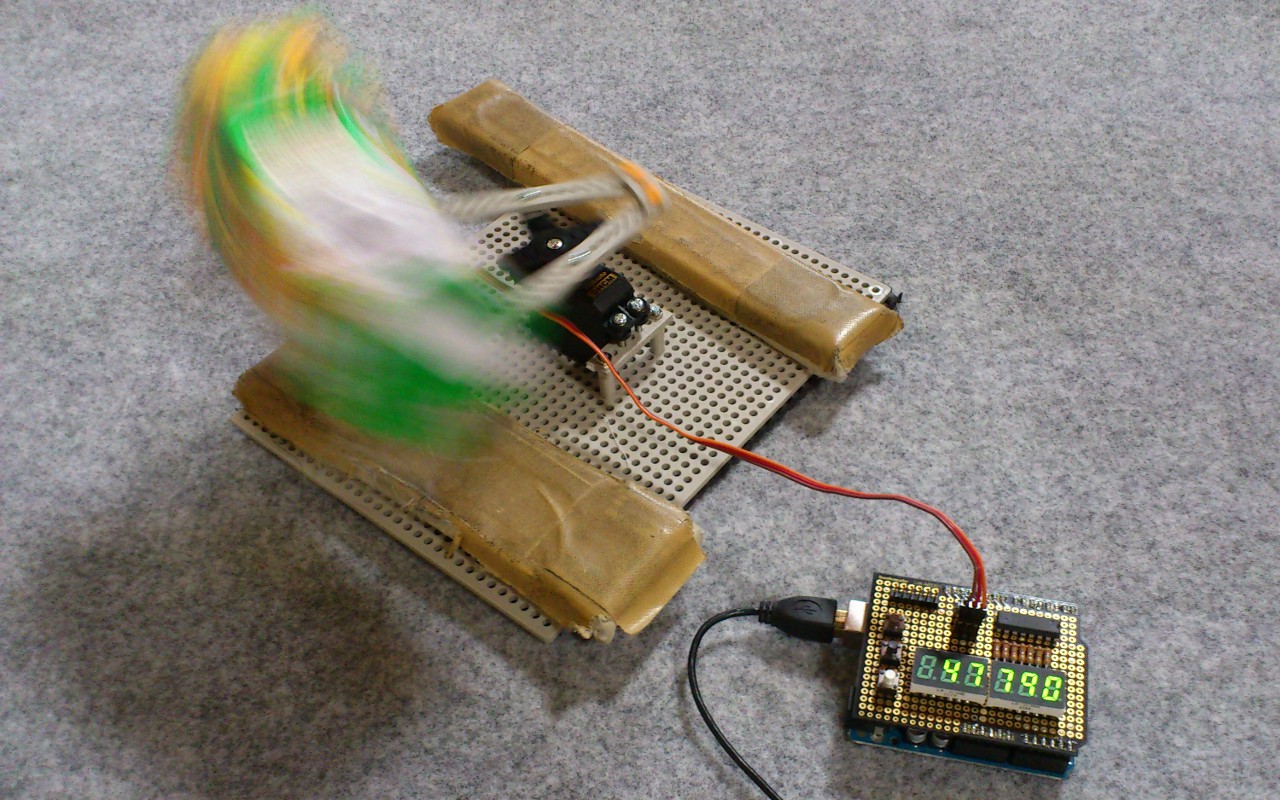
コアラのマーチ振り機
昨年10月頃に、コアラのマーチを振り続けると1つの丸い塊になる、というネタが話題になりました。
Youtubeやニコニコ動画に何万回も振り続けた動画が続々とアップされているのを見ていて、「そんなのコアラのマーチ振り機を作って自動化すればいいじゃない」とtwitterで会話していたのが事の発端でした。
細々と作り続けて、ようやくプロトタイプらしきものが完成・・・
当初の目論見では、クランク機構とハイパワーなステッピングモータなんかを組み合わせて、秒間10回ぐらいで振らせるつもりだったのですが、振動に耐えうる剛性を確保するために、それなりに本格的な構成にする必要があると考えました。
しかし金属加工がほとんど素人な自分にとってはかなり敷居が高い・・・
そうこうしている間に忘却の彼方へ、と毎度の展開になるのも嫌だったので、今回はユニバーサルアームとサーボ(DHCM)を組み合わせて、とにかく貧弱でも「振るもの」を作ることにしました。
ちなみに制御部分はArduinoを利用しています。制限無く振り続ける「フリーランモード」、回数を指定して振る「カウントモード」を実装しています。この部分はもう完成しているので、次は機構のちゃんとしたものを作るよ! というわけでご期待ください。
<2013/3/1 追記>
7セグのライブラリを作ったのでgithubに置いてみました。
https://github.com/oks486/Seg7_4511_Arduino
